



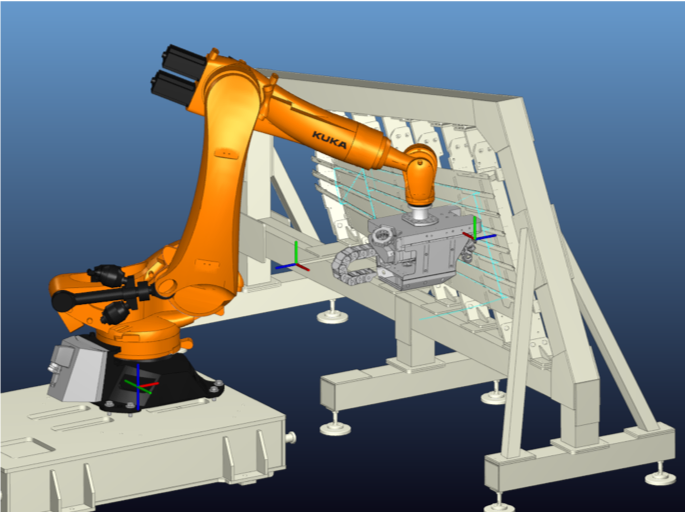
● 機械臂作(zuò)爲載體爲制孔末端執行器提供制孔所需的位置和(hé)姿态,但(dàn)是機械臂本身的絕對(duì)定位精度在不同的位姿差别較大(dà),一般在1mm~3mm,不能(néng)滿足飛(fēi)機制孔的精度要求(±0.5mm)。
● 神工(gōng)科技針對(duì)這(zhè)一難題開(kāi)發出了(le)基于軟件算(suàn)法的“絕對(duì)定位精度動态補償技術”,并針對(duì)不同的應用(yòng)場景開(kāi)發了(le)兩個系列的補償算(suàn)法。以此提高(gāo)了(le)機械臂的絕對(duì)定位精度,達到(dào)±0.15mm的水(shuǐ)平。

● 使設備制孔覆蓋率達到(dào)100%,滿足制孔全過程無人工(gōng)幹預的客戶需求。
● 實現(xiàn)人機兩用(yòng):提升零件裝夾質量和(hé)效率。

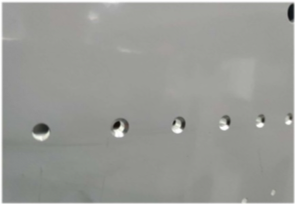
對(duì)于薄壁钣金(jīn)的典型工(gōng)件,剛性差、精度差,很(hěn)難滿足制孔位置精度要求,且會(huì)出現(xiàn)層間孔位錯開(kāi)等問題。神工(gōng)機器人智能(néng)制孔系統完全滿足制孔要求。
對(duì)于薄壁钣金(jīn)的典型工(gōng)件,剛性差、精度差,很(hěn)難滿足制孔位置精度要求,且會(huì)出現(xiàn)層間孔位錯開(kāi)等問題。神工(gōng)機器人智能(néng)制孔系統完全滿足制孔要求。
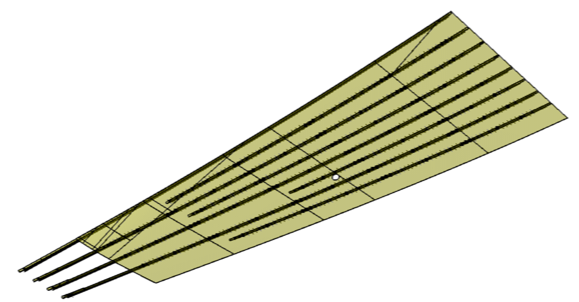
● 主機廠(chǎng)還存在很(hěn)多工(gōng)件數模不完善的情況,神工(gōng)通過與主機廠(chǎng)的深度合作(zuò)和(hé)對(duì)行業、企業标準的理(lǐ)解和(hé)掌握,具備對(duì)工(gōng)件數模進行處理(lǐ)和(hé)完善的能(néng)力。
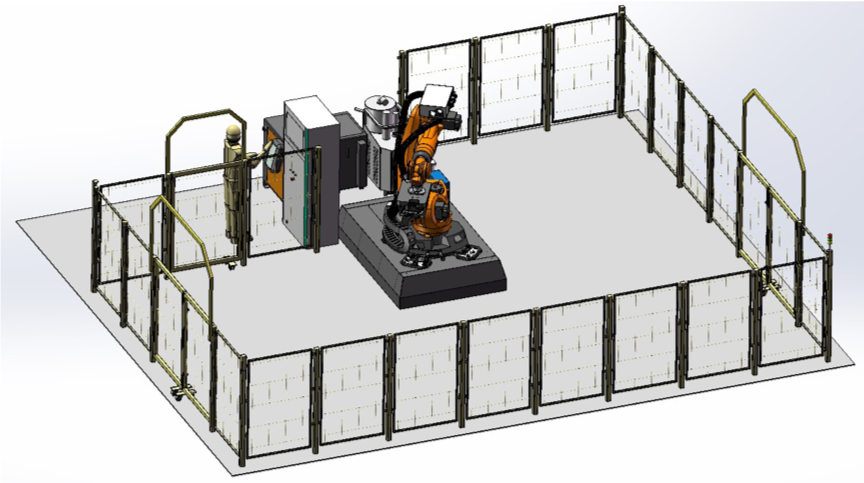
● 不同的加工(gōng)對(duì)象對(duì)機器人制孔系統的需求差異巨大(dà),需要對(duì)産品進行一定的定制化,同時(shí)具有一定的柔性。神工(gōng)根植飛(fēi)機裝備領域,緊密聯系用(yòng)戶,結合實際加工(gōng)對(duì)象的特點進行産品定制化和(hé)系列化開(kāi)發并承擔了(le)推廣應用(yòng)的任務,具有較強的柔性。

地址:北京市東城(chéng)區(qū)和(hé)平裏北街6号26号樓1層102室
電話(huà):010-82822099
市場銷售:[email protected]
人員招聘:[email protected]
傳真:010-82822099
Copyright © 人工(gōng)智能(néng)版權所有



